


© Analog Devices
Application Notes |
Model-based design ... - page 2
There are multiple steps within MBD that allow optimization of individual tasks in the overall design. These tasks can be completed by different design engineers or design teams, and then combined to form the overall design and complete system.
[chapter-index=Application Note link-to=32901,32903,32904]Chapter Index[/chapter-index]With this approach, a higher level of abstraction of the individual tasks can be applied, resulting in an overall design flow optimized for the given end application. All-in-all MBD allows a designer to expand from more classical design schemes and move directly from model creation to simulation, code generation, and HIL test, in a controlled fashion that allows incremental changes in system behavior without a complete redesign of the system.
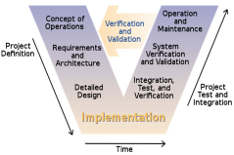
In 3 the different design phases and the scale of individual steps in the flow are visualized. These steps together describe the “standard” flow of MBD. From a motor control design perspective they are:
 All images © Analog Devices.
All images © Analog Devices.
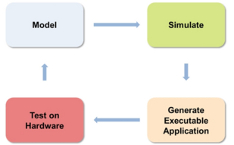
- Concept of Operations: Overall functionality of the motor system
- Plant modeling / Architecture: Development of models of motor, load, power electronics, signal conditioning, etc.
- Controller modeling and requirements: Encoder-based field oriented control of 3 phase PM motor
- Analysis and synthesis – Detailed design: Models created above are used to identify dynamic characteristics of the plant model / Tuning and configuration of the system
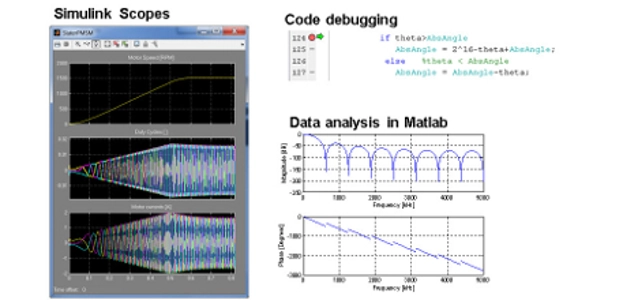
- Validation and test: Off-line simulation and/or real-time simulation / Investigation of time response of the dynamic system
- Deployment to embedded target – Full operation: Automatic code generation/ Test and verification / Updating controller model
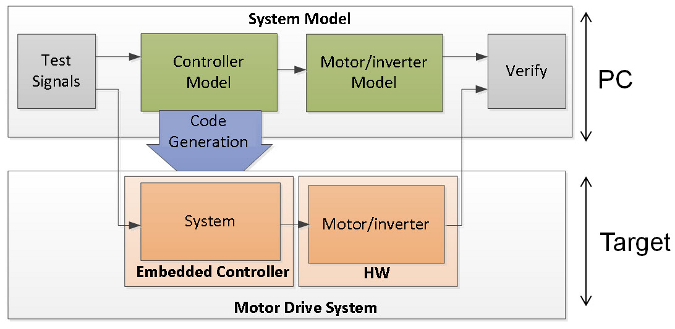
Together this forms a multi-step approach for aligning the overall design and allows individual control steps to be analyzed independently. Once the hardware and software specification has been completed, the complete system architecture can be setup for deployment of both specific algorithm and functionality of the overall system (see 4). Simulation of controller and plant models can be evaluated. Off-line development of algorithms without access to hardware can be architected and fine-tuned to meet overall system performance requirements. Initial code generation, either with existing code “reuse” or code generated by a code generation tool, can be deployed to the embedded controller to compare the system simulation on a PC with the actual implementation data on a hardware target. A designer must consider the complexity of the model when defining a correctly balanced structure for MBD. However, once a balanced concept is realized, it is possible to quickly change independent models within the design and achieve more accurate results from the entire drive system.
 All images © Analog Devices.
All images © Analog Devices..png)